Ziel
Für den bereits bestehenden ZerobotPro, welcher auf einem Raspberry Pi Zero basiert, sollten die Funktionen induktives Laden, Autonomens Fahren inklusive Bilde Erkennung und eine Steuerung über ein Gamepad (Playstation 3 Controller) integriert werden.
Aufgaben
- Steuerung mittels Bluetooth Controller
- Neuentwicklung der Ladeelektronik des ZerobotPro
- Realisierung des autonomen Anfahrens der Ladestation
- Optimierung des Gehäuses des ZerobotPro und der Ladestation
Steuerung mittels Bluetooth Controller
Für den ZerobotPro wurde eine Bluetooth Steuerung mittels Python implementiert. Hierfür wurde die Kopplung zunächst mit dem Tool „sixpair“ erzeugt und ein entsprechendes Programm zur Tastenbelegung in Python erstellt.
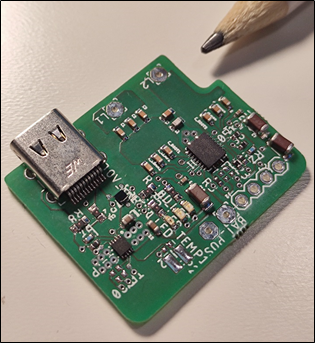
Neuentwicklung der Ladeelektronik
Für die Ladeelektronik wurde eine neue Platine mittels EAGLE entworfen, bestückt und getestet. Für das Laden des Lithium-Ionen-Akkus wurde eine USB- und kabelloser Ladeanschluss vorgesehen. Für zusätzliche Sicherheit wurde ein Überhitzungsschutz, Verpolschutz und Überspannungsschutz integriert. Das Laden wird mittels einer dreistufigen Ladekurve realisiert.
Automatisiertes Anfahren der Ladestation mittels Objekterkennung
Die Erkennung der Ladestation wurde über OpenCV, einer Programmierbibliothek für die Bildverarbeitung und Computer Vision, in Python realisiert. Die Position der Ladestation wird mit einem Tischtennisball, welcher an der Ladestation befestigt wird, über das HSV Farbmodel und eine Entfernungsbestimmung ermittelt. Ab einem bestimmten Akkuladestand wird die autonome Fahrt zur Ladestation initialisiert.
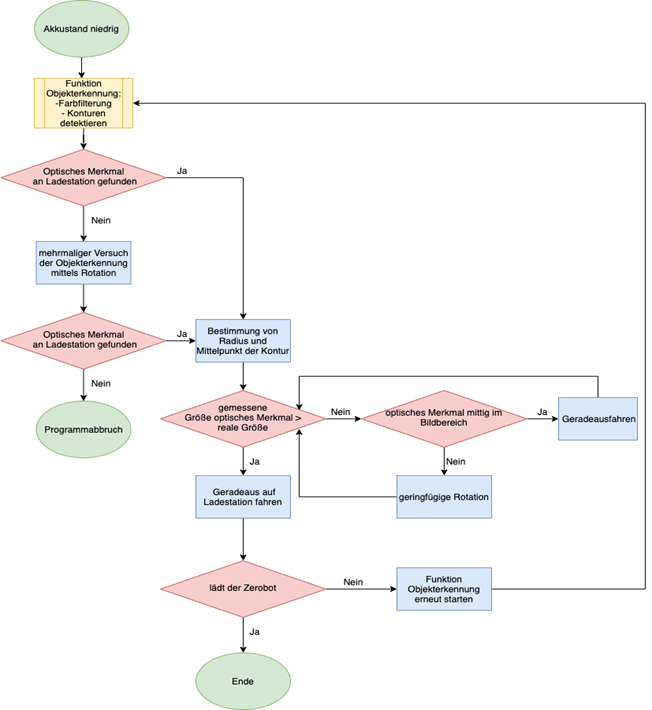
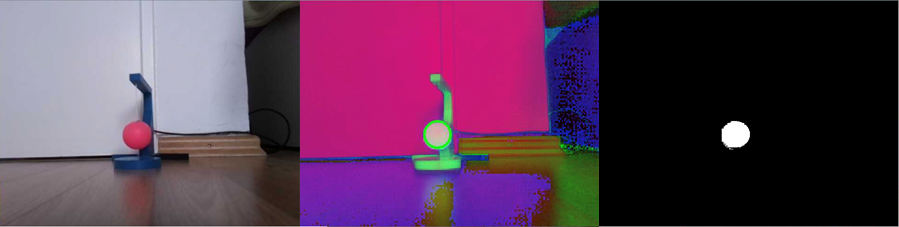
BGR-Farbmodel zu HSV und Konturerkennung.
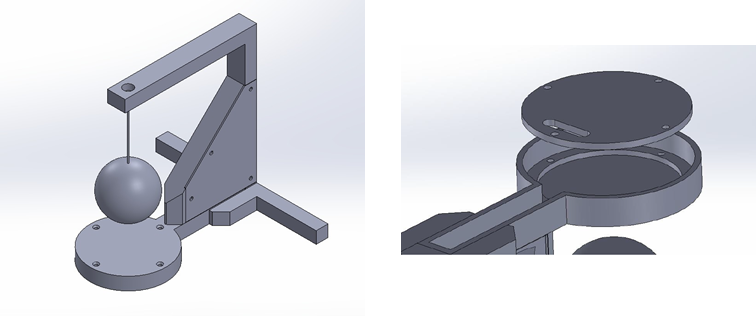
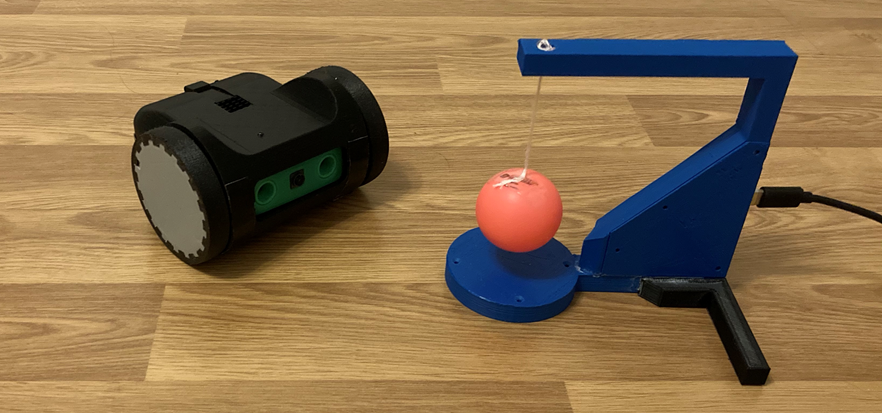
Überarbeitung der Gehäuse des ZerobotPro und der Ladestation
Das Gehäuse des ZerobotPro und der Ladestation würde mit Autodesk Fusion360 konstruiert bzw. überarbeitet und mit 3D-Drückern hergestellt. Das Gehäuse des ZerobotPro musste so angepasst werden das die neue Ladeelektronik platzfindet und das Anfahren der Ladestation erleichtert wird. Für ein Leichtes anfahren der Ladestation, aus möglichst allen Richtungen, wurde ein rundes Gehäuse für die zur Verfügung gestellten Ladeplatte entworfen. Außerdem wurde eine Konstruktion entworfen, um den Tischtennisball beweglich über der Ladeplatte anzubringen.